双目立体视觉技术
双目立体视觉技术的核心目的,是提高识别的准确率。由于立体视觉技术形成的视场中带有物体的三维几何信息,因此能够有效的设定检测规则,排除光线、影子等干扰因素,大幅提高智能分析的准确度。如果说高清技术通过提升可用像素来提高分析的准确率,是战术性的举措,那么双目立体视觉技术对视频分析准确率的影响则是战略性的。
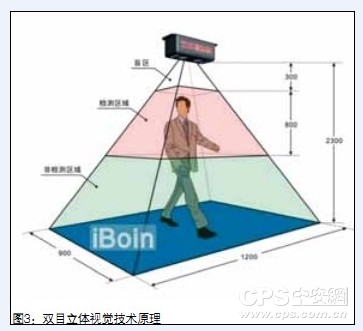
双目立体视觉技术是基于视差原理,并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。
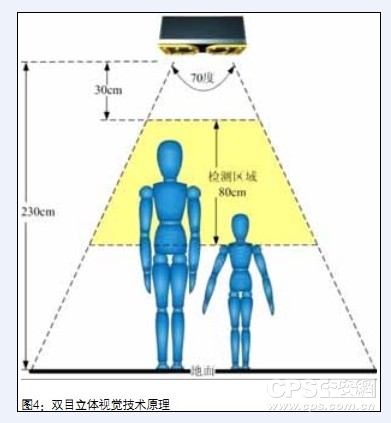
采用双相机或多相机,对视场内空间的自由运动体的三维位置坐标及姿态进行高精度的测量,确定运动目标的质心位置,并根据标定结果对运动目标进行高精度跟踪。
立体视觉技术的跟踪,由于能够辨识目标的三维坐标、姿态、相对距离、与背景环境的空间距离,因此能适应复杂的跟踪背景环境。
多球机联动跟踪
多球机联动跟踪技术,是以单球机智能跟踪技术作为基础的。从应用的层面上看,能够将普通的跟踪球机的单点式监控,提升为系统内对单个目标的无缝式接力跟踪,配合电子地图的使用,能够容易的实现对高安全等级区域的无缝式跟踪,并实现目标轨迹描绘、犯罪行为预警等高等级的安保需求。
多球机联动跟踪技术的实现,需要首先具备多目标识别与跟踪技术。在应用中,通常设定一台球机作为发起点,对广域范围内目标进行的智能行为分析,并将同时监控的多个目标按照既定的策略进行排序,并按照先后顺序,指挥智能跟踪球机逐个跟踪监控目标。与单目标跟踪相比,多目标跟踪技术的关键点是数据关联问题,即建立一个统一的坐标系,使得发起球机可以将目标的坐标信息传递给跟踪球机,实现联动跟踪。
多目标跟踪的过程可以划分为以下几部分:
数据关联:在观测数据和目标之间建立起对应关系。常见的方法有最近邻算法、联合概率数据关联滤波器、多假设跟踪算法。
状态估计:通常将多目标跟踪问题转化成对多个单目标的跟踪过程,并建立相应的状态空间模型。为每个目标分配一个单目标跟踪器,相互独立地跟踪每个目标,通过设计一些特殊的方法来处理目标之间的交互和遮挡问题。
坐标传递:在关联的球机之间建立统一的坐标系
在多目标监控场景中,提取目标的位置和运动轨迹信息,发送给下一个球机,下一个球机根据目标的位置和运动轨迹信息跟踪锁定目标。
另外,多目标跟踪技术在实际的应用中,还需要重点优化和改进以下方面:提升算法的效率,以实现同时能够跟踪尽量多的目标;需要改进算法的抗干扰性能,以减轻光线变化、影子、目标间遮挡等常见的干扰因素;需要能够对每个目标排定警戒优先级,以使球机在跟踪时能够及时切换到威胁等级更高的目标。
【中安网原创稿件声明】转载中安网文章时应遵循以下三个规则:1、保持原创文章中图表、图片、音视频的完整性;2、完整标注文章作者[文章前后有说明];3、转载中安网原创中部分内容也要完整标注来源"中安网",违者本网将依法追究。
【想第一时间了解安防行业的重磅新闻吗?请立即关注中安网官方微信(微信号:cpscomcn)——安防行业第一人气微信,万千精彩,千万不要错过!!!

网友评论
共有0条评论 点击查看全部>>24小时阅读排行
本周阅读排行





