①脉冲驱动电路组成原理
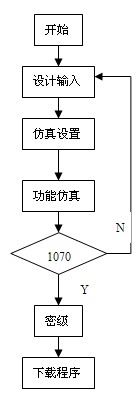
图5、CPLD开发流程
脉冲驱动电路主要由晶振、驱动芯片MIC4452及可编程逻辑器件EPM7032S组成。晶振的主要作用是提供一个50MHz的标准时钟,EPM7032S中下载有产生所需驱动脉冲的程序,产生脉宽20~25ns,重复频率10~15kHz的脉冲,输出的驱动脉冲最终经过驱动芯片MIC4452,出来的就是供给激光管PGEW3S09的驱动脉冲并使之发射脉冲激光。驱动电路的设计实现框图如图6所示。

图6、驱动电路的设计实现框图
②实现驱动电路的方法
产生所需要的符合脉宽(20~25ns)和频率要求(10~15kHz)的脉冲,提供给驱动芯片作为周期性脉冲触发信号,可以有下述二种方法:
·方法1:利用555芯片和CPLD实现驱动电路
集成电路555是其内部含有3个5kHz电阻而得名。虽然它产生的脉冲频率和占空比可调,但还不能满足对脉宽和占空比的要求。因此可先用555产生占空比50%的5kHz脉冲,再用CPLD来精佣地调节占空比和脉宽。
可将利用555得出的占空比为50%的时钟信号(5kHz)输入一个LCELL延时链路,再把延时的结果和输入前的时钟信号作一次异或再输出,就是所需要的10kHz、占空比为0.025%的信号,其脉冲宽度为25ns,基本符合要求。值得提出的是,CPLD各个器件的延时是不一样的,因此在实际使用时对延时次数还需要多次测试,并且这个延时次数与所选的器件有关,现利用LCELL延时7次。
利用MAX+Plus Ⅱ设计的逻辑电路如图7所示。
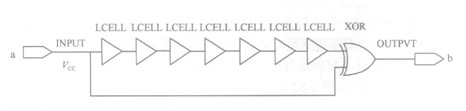
图7、利用MAX+Plus Ⅱ设计的逻辑电路
通过这种方法,得到了驱动脉冲的周期为100μs的信号,也就是重复频率10kHz、脉冲宽度为25ns的符合要求的信号。
·方法2:利用CPLD的逻辑实现驱动电路的设计
学电子的人知道,分频器是数字系统设计中的基本电路,根据不同的设计需要,可用它作偶数分频、奇数分频、半整数分频等,有时要求等占空比,也有时要求非等占空比。在同一设计中,有时要求多种形式的分频。通常,由计数器或计数器的级联构成各种形式的偶数分频及非等占空比的奇数分频,实现较为简单。
利用CPLD的逻辑实现驱动电路如图8所示。
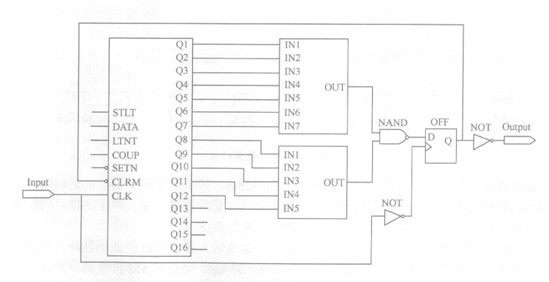
图8、利用CPLD的逻辑实现驱动电路图
由图8可知,分频器由带使能端的异或门、模N计数器和一个2分频器组成。设计用D触发器来完成2分频的功能,实现方法是将触发器的Q反输出端反馈回计数器的清零端,将计数器的一个计数输出端作为D触发器的时钟输入端。
这种方法主要使用了计数器的进位思想,首先使用16位计数器中的12位作为进位控制,这样每212个输入脉冲产生一个进位脉冲,同时输入脉冲取反后接到D触发器的时钟上,D触发器的输出作为计数器的清零信号,需要的驱动脉冲由D触发器输出信号取反获得。
在设计中,输出驱动脉冲的脉宽由原始输入脉冲的周期决定,驱动脉冲的重复频率由计数器的计数位数决定。如原始输入脉冲的周期为20ns(50MHz),则输出脉冲的脉宽等于输入脉冲的一个周期20ns,而输出脉冲的周期等于输入脉冲的一个周期与计数器最大计数值的乘积。即 20ns×4000=80μs。
利用MAX+Plus Ⅱ仿真即可看到,在输入脉冲为50MHz、占空比为50%时,输出驱动脉冲的周期为80μs(即重复频率12.5kHz,脉宽为20ns),与设计分析结果一致。如果需要改变输出驱动脉冲的脉宽,可以通过改变输入脉冲的频率实现;同样,如果需要改变输出驱动脉冲的周期(频率),可以通过改变计数器的计数位数实现。
·方法1、2的比较
虽然,两种方法都能实现要求,但在使用第1种方法时要考虑以下2种情况:
一是使用555产生占空比为50%的5kHz脉冲,这是输入到CPLD的原始脉冲。由于实际应用中对555的PCB布线或者元器件的选择、焊接等问题,会使得555产生的原始脉冲的上升和下降沿需要一定的时间,这将给后面的接收带来误差。
二是使用LCELL器件延时要注意,对于不同型号的CPLD,该器件的延时时间不同,这意味着如换了不同型号的CPLD,逻辑电路要重新测试和仿真。
第2种方法是直接把晶振作为原始输入脉冲,经过逻辑运算得到驱动脉冲,结果比方法1更为准确。并且,对于这种方法的逻辑电路,不同型号的CPLD的仿真结果是一致的,不需要因为更换CPLD的型号而重新设计逻辑电路。因此,方法2有更高的准确性和更强的实用性。
(3)接收模块主要芯片选择
在接收模块中,为保证实时信号处理中连续工作的探测器采集到的数据不丢失,就必须要求脉冲信号采样和数据传输能够同时进行。因此,要求接收模块的芯片有很强的快速处理能力。
在接收模块中,除选好与发光器件对应波段的光电探测器件APD外,主要芯片是前置放大器与高通比较器。
①前置放大器Ua733M
前置放大器Ua733M的选用,主要从频带宽度、输入阻抗和放大倍数来考虑。
·频带宽度
对于脉冲信号,其主要频谱能量集中在Δf=0~1/tn以内(tn为脉冲宽度)。在光谱测量、光电跟踪等系统中,并不要求严格保持脉冲信号的形状,所以为了得到好的信噪比而牺牲高频分量。但在脉冲激光测距、扫描成像等系统中,要保持脉冲形不失真或失真很小,这就要求能通过高频分量。
放大器对矩形脉冲的响应特性与放大器的带宽有关。脉冲宽度越窄,要求放大器的带宽越宽,否则矩形脉冲将会被展宽,其幅度也会随之下降。Δf为放大器的3dB带宽,随着Δf的加宽,输入信号与带宽的平方成正比,峰值功率上升,响应时间缩短。但带宽在增加,则响应时间减少,输出信号的功率很快达到常数且与带宽无关。由于输出噪声功率与带宽线性增加,因而有一最佳带宽,此时信噪比最大。
对于矩形脉冲,当Δf×τ=0.5时,就出现最大值;而对于其他各种脉冲,获得性噪比的带宽都在Δf×τ=0.25~0.75的范围内。
【中安网原创稿件声明】转载中安网文章时应遵循以下三个规则:1、保持原创文章中图表、图片、音视频的完整性;2、完整标注文章作者[文章前后有说明];3、转载中安网原创中部分内容也要完整标注来源"中安网",违者本网将依法追究。
【想第一时间了解安防行业的重磅新闻吗?请立即关注中安网官方微信(微信号:cpscomcn)——安防行业第一人气微信,万千精彩,千万不要错过!!!

网友评论
共有0条评论 点击查看全部>>24小时阅读排行
本周阅读排行





